A pre-ICUAS public workshop event report took place in Valamar Lacroma Dubrovnik from 14:00 to 18:00 (GMT+2) as a part of the USEPE dissemination events.
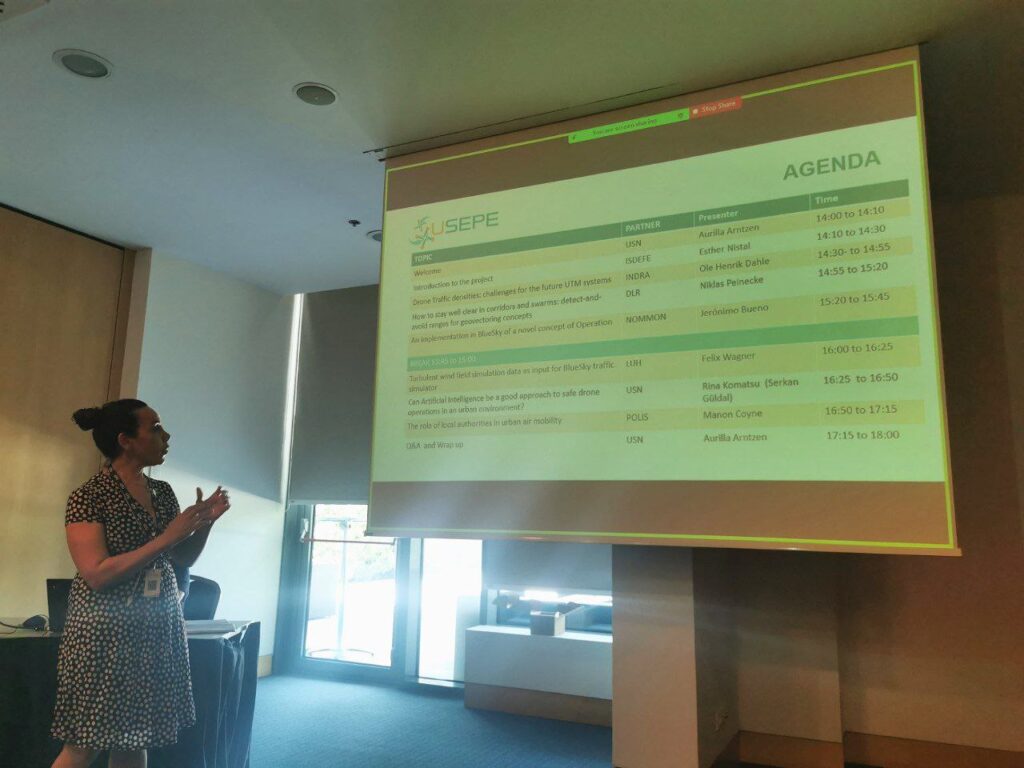
Aurelie Aurilla Arntzen the communication leader of USEPE opened the workshop with a presentation on the current market regulation of drone activity and the main challenges that USEPE wants to tackle, such as:
- rules for drones – international, internal, local, etc.,
- drone separation in U-space,
- conflict detection,
- architecture of U-space,
- communication loss and other possible bag and issues that may appear in the nearest future.
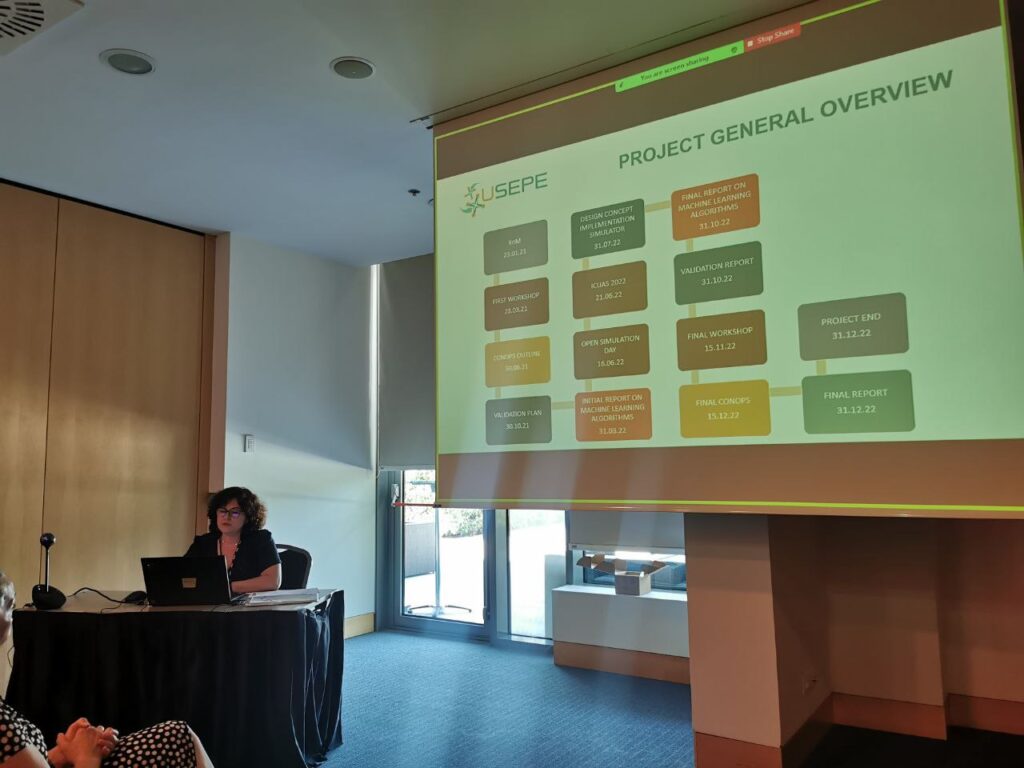
After the introductory presentation, Esther Nistal Cabanas stepped in and presented the most important technical project overview:
• AI use for drones in urban and suburban areas with the main functions on operational, safety, technical levels
• Dynamic density corridor concept – D2C2
• Uncontrolled airspace – ZU
• Controlled airspace (CTR) – ZA
• Separation method study, with the 4 main methods outlined (using the analytics hierarchy method)
• BlueSky simulator – USEPE real-life U-space simulator tool
The USEPE project method consists of D2C2 = that combines “high-speed corridors”+ “density-spaced airspaces” + “geovectoring” and is controlled by 63 main requirements. USEPE will use 3 validation exercises to confirm the approach above the last-mile delivery test + emergency service test + urban surveillance test.

Ole Henrik Dahle – the engineer at Indra continued with the presentation on the existing studies and projects that aimed to create the most advanced and coherent U-space separation method with the different approaches to drone traffic densities.
- Metropolis project – fictional city size of 1600 miles with a drone port and drone deliveries
- San Francisco bay area – 100×100 km area – simultaneous flight scenarios
- Manhattan – simultaneous drone delivery
- Sendai, Japan – drone delivery pilot on the expectation in 2030/10×5 km2
- Dallas firth worth – Simulated UAM traffic system in the area of 24,200 km2 and 20 vertiports installed
- Braunschweig – 3 delivery centers on the area of 20km2
- Hamburg – drone taxi simulator
- Hannover – the size of the simulation of 300km2 – simulator over the city and the airport – USEPE current testing field
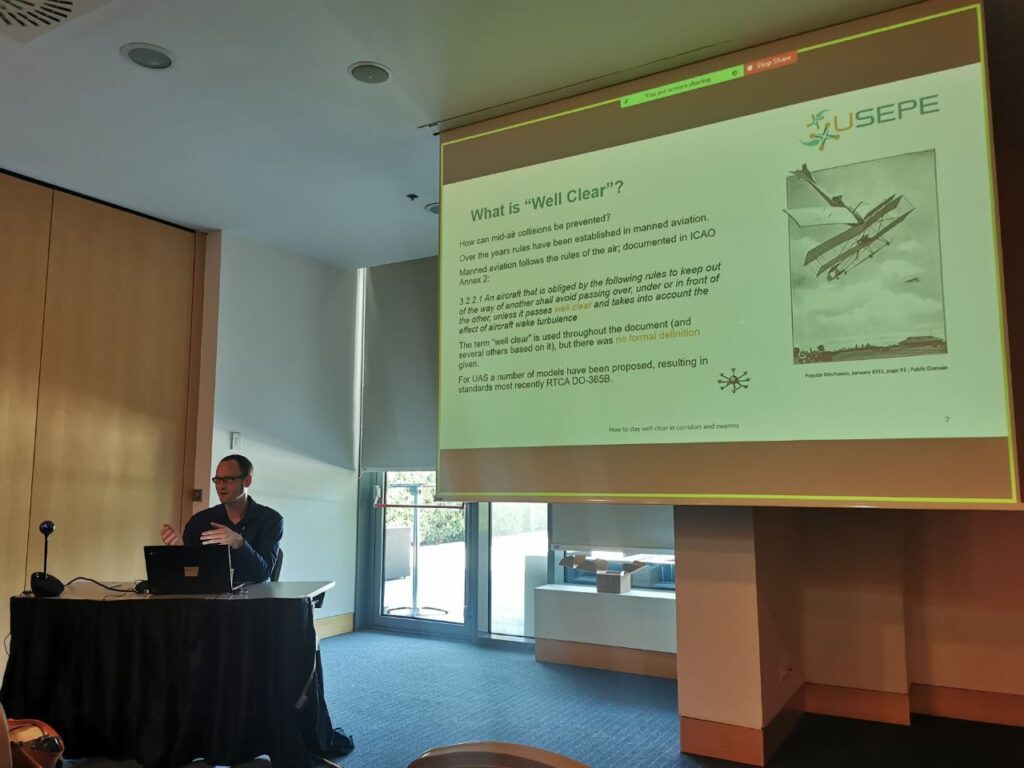
Niklas Peinecke a Research Scientist at DLR (German Aerospace Center) presented a U-space separation methods and their current existing alternatives that help to minimize collisions in the U-space with a high density-traffic and their effect on the best-estimated trajectory of the drone.
• Detect and avoid system RDR + sensor processing time
• ATC – air traffic control
• DAA(detect and avoid) – the ACAS approach measuring the waves by a sensor (however does not include aircraft performance paraments)
• ACAS-X approach – the older method that was calculating the speed, that is now substituted by the newer one which pre-compute the trajectory and speed of the drone before the take-off.
• USEPE approach – dedicated lookup table for each possible combination of drones which also pre-calculate possibilities of change, collision, wind, etc. USEPE approach uses DAA – avoidance vertically and horizontally, calculating the altitude, or speed change avoidance. Mistake factor: weather, sensor inaccuracies.
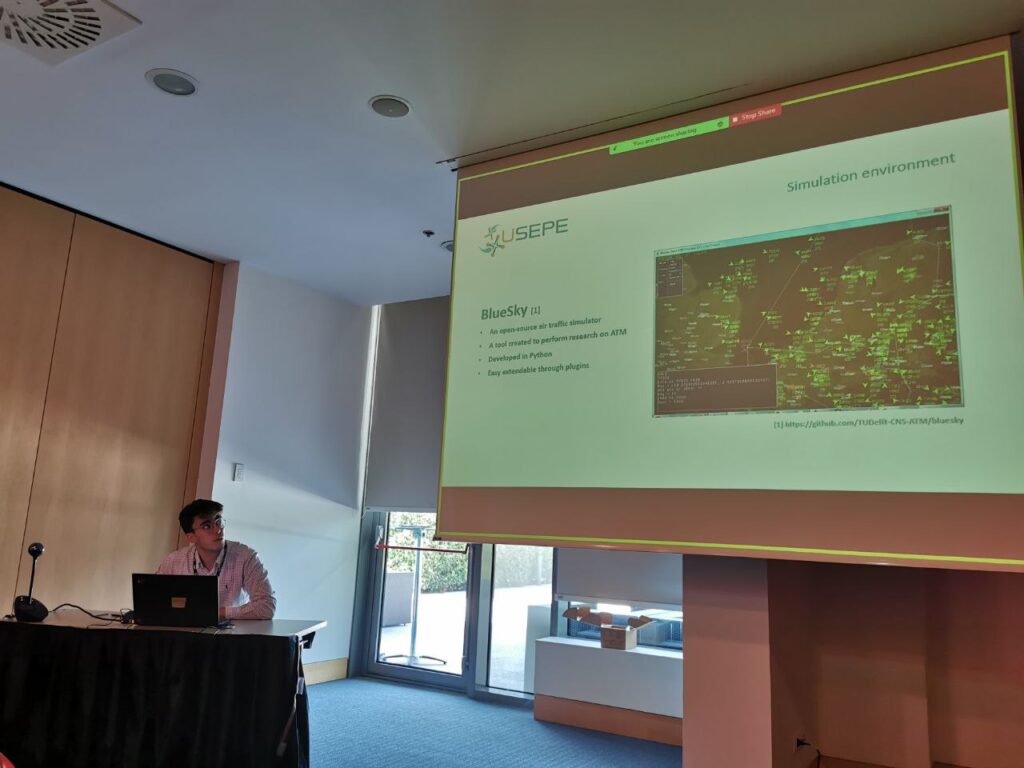
Jeronimo Bueno presented a BlueSky which is meant as a tool to perform research on Air Traffic Management and Air Traffic Flows, and is distributed under the GNU General Public License v3. The goal of BlueSky is to provide everybody who wants to visualize, analyze or simulate air traffic with a tool to do so without any restrictions, licenses or limitations. It can be copied, modified, cited, etc. without any limitations.
The main benefits of the BlueSky for the USEPE testing are:
- It is written in the freely available, ultra-simple-hence-easy-to-learn, multi-platform language Python
- Extensible by means of self-contained plugins
- Contains open source data on navaids, performance data of aircraft and geography
- Global coverage navaid and airport data
- Contains simulations of aircraft performance, flight management system (LNAV, VNAV under construction), autopilot, conflict detection and resolution and airborne separation assurance systems, etc.

Felix Wagner continued with the presentation on the turbulence simulation tool applied in the BlueSky simulator, to recreate a real-life scenarios of the drone fly in the U-space and how it is effected by the weather conditions and the surroundings.
• PALM – wind field data – advanced AI atmospheric and oceanic air flows, combined with the high resolution wind-field data, and simulate different meteorological conditions
• All the scenarios were applied in Hannover city center and represents that even a slight temperature or wind change lead to different turbulence, therefore, changing the pre-calculated trajectory of the drone.
• The tool helps to define potentially hazardous areas for drones and help to eliminate such areas as the no-fly zones.
The trajectory turbulence influence was also accompanied by the presentation of Rina Komatsu- a researcher at the University of Sørøst-Norge. She was able to apply a machine learning method in a conflict resolution. Therefore, based on her study we can now define what is an automatic drone trajectory in case of the connection loss or an unsupervised fly. To pre-calculate the trajectory Rina used a neural network RNN (last value prediction based on a sequel data or time series of data). Based on the study the higher the number of hidden layers providers the more reliable RNN prediction is presented. Moreover, a smaller batch size leads to more reliable RNN prediction.

Manon Coyne from POLIS network finished the workshop meeting with the presentation on the role of local authorities in drones regulations.
Manon stated that soon there will be various practical use-scenarios for different type of drones, most of which are already in use, such as: last mile delivery, urban surveillance, emergency delivery, sub-urban delivery, surveillance of crowds (safety), transportation and mobility of people, etc.
However, there are risks and issues associated with the high density drones traffic at U-space – the rising number of drones and increase complexity, safety, security, privacy and environmental risks.
Based on Manon research the current EU regulation on U-Space regulatory framework is only the entry level to establish a coherent regulations for the safe drones use. She suggests that the EU member states should establish U-space and airspace requirements based on their local law, to fit the best to the societal needs; the rules for the operators, providers and service units must be established before we enter to the era of the high-density U-space; local and national authorities must define the competences for the sector, as well as become well-educated in the area, too
On the other hand, Manon also insisted that both Private and Public stakeholder, as well as a USEPE projects have to meet the needs of the authorities and educate them, too. We must establish awareness, education, coordination, political guidance & harmonization of the U-Space regulations, launch education programs, set the findings & resources for R&D in the air-space sector.
CONCLUSION
During this dissemination event on the pre-ICUAS 2022, USEPE workshop was attended by more than 25 visitors. USEPE stakeholders were able to present the main objectives and tasks of the projects and combine the best available methods. We were also able to engage in the highly-interactive technical discussions with the visitor during the workshop. It was a valuable experience for us, to exchange the knowledge and opinions on the U-Space for the future Air-Mobility.
Thanks to the participants for joining and featuring us. We are pleased by your interest on the ICUAS-USEPE stand, as well as, by the engagement during the workshop. All the stakeholders did an amazing job!